Training - IMK Engineering – Ingenieurbüro für Mechatronik und Kybernetik Dr. Bruns
Hauptmenü:
Bereiche
Bereiche ⇒ Training
Unter dem Begriff „Training“ bieten wir die Durchführung von Seminaren, Schulungen oder Lehrveranstaltungen an, deren Ziel es ist, Kompetenzen im Bereich der Entwicklung und der Realisierung technischer Systeme zu erlangen. Die Inhalte der Seminare können Themen betreffen, die auf unserer Webpräsenz behandelt werden. Darüber hinaus bieten wir aber auch spezielle Schulungen für den Umgang mit wichtigen „Software-Werkzeugen“ („Tools“) an, wie bspw. Matlab (kommerziell; primär für numerische Berechnungen), Scilab (freie Alternative zu Matlab) oder Maple (Computeralgebrasystem). Große Bedeutung bei der Entwicklung technischer Systeme (mechatronisch oder kybernetisch) hat inzwischen auch die objektorientierte Modellierungssprache Modelica erlangt. Sie wird verwendet in „Tools“ wie bspw. Dymola (kommerziell) oder OpenModelica (freie Alternative zu Dymola). Sprechen Sie uns an, wenn Sie in Ihrem Hause Bedarf sehen. Wir prüfen umgehend, was wir für Sie tun können.
Im Folgenden finden Sie ein Beispiel dafür, wie eines unserer Seminare gestaltet ist, wenn die Vermittlung theoretischer regelungstechnischer Kenntnisse und deren praktische Anwendung mit entsprechenden „Tools“ erfolgreich kombiniert werden.
Training Training is teaching, or developing in oneself or others, any skills and knowledge that relate to specific useful competencies. Training has specific goals of improving one's capability, capacity, productivity and performance. It forms the core of apprenticeships and provides the backbone of content at institutes of technology. (Quelle: Wikipedia) |

Beispiel: CAE-Seminar Mehrgrößenregelung
Dieses Seminar wurde in der weiter unten detailliert dargestellten Form von Dr. Bruns konzipiert und in den Jahren 2004 bis 2006 an der Universität Paderborn durchgeführt. Nicht zuletzt die starke Anlehnung an seinerzeit aktuelle Projekte und Forschungsarbeiten im Bereich der Fahrwerktechnik sorgten für eine äußerst positive Resonanz bei den Studenten.
Inhalt:
Rechnergestützter Entwurf am Beispiel eines aktiv gefederten Fahrzeugs
Art der Durchführung:
Blockseminar: 4 Tage (je 8 Std.)
Zielgruppe:
7./9. Semester Maschinenbau, Technomathematik, Ingenieurinformatik
Ziele:
- Anwendung und Vertiefung des Stoffes aus der Vorlesung „Mehrgrößenregelungen“
- Einblick in die moderne Entwicklung mechatronischer Systeme
- Arbeiten mit Modellierungs- und Analysewerkzeugen
Voraussetzungen:
- Regelungstechnik I / II
- Mehrgrößenregelungen
1. Termin:
Einführung in die CAE-Tools CAMeL-View (vergleichbar mit Dymola
bzw. Modelica) und Scilab (vergleichbar mit Matlab und Octave)
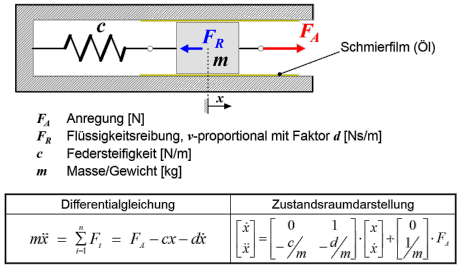
- Modellierung des Einmassenschwingers ...
- ... als Starrkörpersystem mit Elementen (Mass, Spring,
Damper, Joint) von CAMeL-View - ... als Differentialgleichungssystem (Scilab)
- Simulation der beiden (äquivalenten) Systeme bei Sprunganregung
- Berechnung und Analyse der Eigenwerte: Real- und Imaginärteil,
Eigenfrequenz und Dämpfung - Frequenzgänge des Systems plotten
- Übertragungspfad Kraft $\rightarrow$ Position
- Übertragungspfad Kraft $\rightarrow$ Geschwindigkeit
- Steuerbarkeit und Beobachtbarkeit (nach KALMAN) prüfen
- Regler implementieren: $P$-, $PI$- und $PIDT_1$-Regler
- Analyse im Zeitbereich (Sprunganregung) und Frequenzbereich
(Frequenzgang) - Regler auslegen bzw. Regler-Parameter modellbasiert bestimmen
2. Termin:
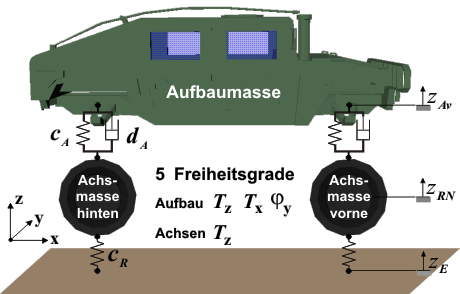
Modellierung eines passiven „Halbfahrzeugs“ und Analyse der Dynamik
- Modellierung des Fahrzeugs als Starrkörper-/Mehrkörpersystem
(CAMeL-View) - Modellierung der Anregung durch Straße/Gelände (CAMeL-View)
- Modellierung der Anregung durch den Antriebsstrang (CAMeL-View)
- Linearisierung des Fahrzeugmodells und Export in
Zustandsraumdarstellung ($\dot x = Ax + Bu$, $y = Cx$) nach Scilab - $u$: Aktorkärfte vorne und hinten
- $y$: Zustandsvektor
- Analyse der Eigenwerte (CAMeL-View und Scilab)
- Ausgangsmatrix C „numerisch bereinigen“
3. Termin:
„Halbfahrzeug“ mit aktivem Fahrwerk (CAMeL-View, Scilab);
Auslegung und Implementierung eines RICCATI-Reglers
Auslegung und Implementierung eines RICCATI-Reglers
- Modell (CAMeL-View) modifizieren
- Modellerweiterung um aktive Komponenten
- Zustandssensor implementieren
- Linearisiertes Modell von CAMeL nach Scilab exportieren
- Modell analysieren und numerisch bereinigen
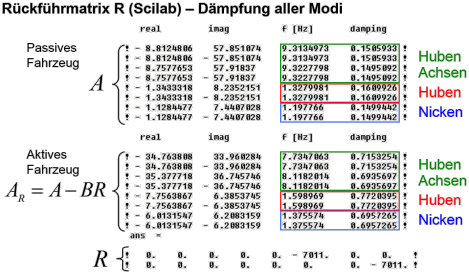
- Reglersynthese: Zustandsregler nach RICCATI (Scilab)
- Rückführmatrix berechnen
- Analyse des geregelten System
- RICCATI-Regler in CAMel-Modell integrieren
- Zustandsrückführung implementieren
- Experimente und Analyse (Eigenwerte, Simulation, Frequenzgänge)
- Potenzial einer Störgrößenaufschaltung:
Schätzung der Geländeanregung
4. Termin:
„Halbfahrzeug“ mit aktivem Fahrwerk (CAMeL-View, Scilab);
Zustandsbeobachter und Zustandsregler durch Polvorgabe
Zustandsbeobachter und Zustandsregler durch Polvorgabe
- Beobachtbarkeit prüfen (nach HAUTUS bzw. durch Modaltransformation)
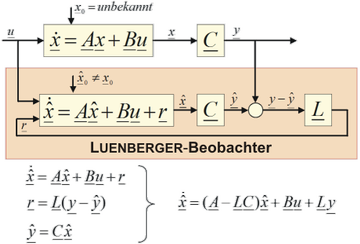
- Auslegung eines Zustandsbeobachters (LUENBERGER-Beobachter)
- Auslegung eines Zustandsreglers
(Vollständige modale Synthese nach ROPPENECKER) - Implementierung von Beobachter und Regler in CAMeL-View
- Experimente und Analyse (Eigenwerte, Simulation, Frequenzgänge)