Kybernetik & Mechatronik - IMK Engineering – Ingenieurbüro für Mechatronik und Kybernetik Dr. Bruns
Hauptmenü:
F & E
Forschung & Entwicklung ⇒ Kybernetik & Mechatronik
Der Begriff „Kybernetik“ wurde in den 1940er Jahren durch den amerikanischen Mathematiker Norbert WIENER (1894-1964) und die Wissenschaftler um ihn herum geprägt und sollte das gesamte Gebiet der Regelungs- und Informationstheorie, egal ob im Hinblick auf eine Maschine oder ein Lebewesen, zu einer einheitlichen Lehre zusammenfassen [1]. Der Begriff Kybernetik leitet sich ab von dem griechischen Wort für „Steuermann“ und wird vielfach auch mit der Formel „Die Kunst des Steuerns“ beschrieben.
Ursprünglich standen Steuerung und Reglung von Maschinen im Fokus. Weiterhin beschäftigte man sich in der Anfangsphase intensiv mit dem Nervensystem von Lebewesen und den damit verbunden Regelungsvorgängen und Informationsflüssen. Die Ergebnisse des letztgenannten Forschungsfelds legten den Grundstein für die Theorie der künstlichen neuronalen Netze, die dem Forschungsgebiet „Künstliche Intelligenz“ (KI) zuzuordnen ist.
Generell wird die Kybernetik heute als die „Kunst“ verstanden, dynamische Systeme derart zu steuern, dass sie sich in einer gewünschten Weise verhalten. Dabei ist es prinzipiell egal, ob es sich bei dem System bspw. um ein technisches, biologisches oder gesellschaftliches System handelt, denn die mathematischen Methoden zur Beschreibung des dynamischen Systemverhaltens (s. a. Systemtheorie) sowie die mathematischen Methoden für den Entwurf des Steuerungs- bzw. Regelalgorithmus sind in sämtlichen Fällen identisch.
Norbert Wiener, Begründer der Kybernetik
Auch in Deutschland beschäftigte man sich in den 1940er Jahren mit nahezu identischen Fragestellungen. Hier war es vor allem Hermann SCHMIDT, der mit seiner "Allgemeinen Regelungskunde" (General Control Theory) für Aufsehen sorgte und als einer der ersten erkannte, dass die Grundprinzipien der Regelungstechnik sich in allen Bereichen und Fachdisziplinen wiederfinden, insbesondere in der Biologie [2].
„In der Entwicklung von Regeleinrichtungen scheinen wir uns ganz in den Spuren der Natur und nach ihrem Gesetz zu bewegen, die uns in Pflanze, Tier und Mensch die Regelung vielfältig vorgemacht hat.“ (Hermann SCHMIDT, 1940) | ||
[1] | Norbert Wiener: Cybernetics – Or Control and Communication in the Animal and the Machine. The MIT Press, 1965 | |
[2] | Hermann Schmidt: Denkschrift zur Gründung eines Institutes für Regelungstechnik. VDI-Zeitschrift, Bd 85 (1941), S. 81/104, 1941 | |
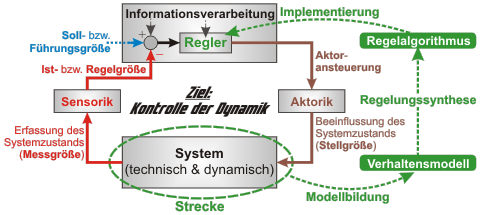
Grundstruktur eines technischen kybernetischen Systems
Mechatronik
Die Mechatronik ist demnach ein Spezialgebiet der Kybernetik, bei dem das Bewegungsverhalten, also das dynamische Verhalten, von mechanischen Systemen im Fokus steht. Mechanische Systeme sind durch mindestens eine bewegte Masse gekennzeichnet, deren Bewegung durch „angreifende“ Kräfte und Momente determiniert wird. In der Regel bestehen mechanische Systeme aber aus mehreren Massen (Mehrkörpersysteme oder auch kurz MKS), die durch Gelenke sowie durch Feder- und Dämpferelemente miteinander verkoppelt sind. An diesen Mehrkörpersystemen können an unterschiedlichsten Stellen (externe) Kräfte und Momente wirksam werden und damit das Bewegungsverhalten entscheidend beeinflussen. Bei der Mechatronik geht es nun darum, durch eine geeignete Sensorik das aktuelle Bewegungsverhalten (Ist-Verhalten) zu erfassen, mit einem gewünschten Soll-Verhalten zu vergleichen und dann über eine geeignete Aktorik (oder auch Aktuatorik) korrigierend wirkende Kräfte und Momente in das System einzuleiten, falls es Abweichungen zwischen Soll- und Ist-Verhalten gibt. Um Mechatronik, und damit natürlich auch Kybernetik, betreiben zu können, sind die Teilgebiete Modellbildung & Simulation sowie IT & Regelungstechnik zwingend erforderlich.
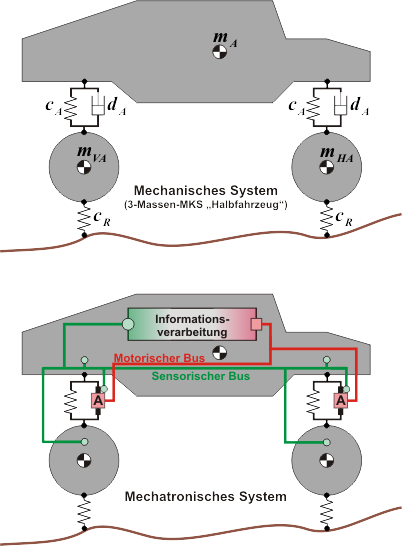
Mechanisches vs. Mechatronisches System
Interessen und Aktivitäten des IMK
Technische Systeme werden immer „intelligenter“, Ziel ist das selbsttätig geregelte, autonome System, das in seiner jeweiligen Umwelt optimal funktioniert. Ändern sich die Umweltbedingungen, so passt sich das System eigenständig an. Denkbar ist auch, dass das System seine „Regelung“ selbst erlernt, ähnlich einem kleinen Kinde, welches das Laufen erlernt. Dies wird bspw. zukünftig einen Schwerpunkt bilden im Bereich „Robotic Motion Control“, insbesondere wenn es darum geht, Regelungen für hochkomplexe, nichtlineare Laufsysteme zu entwickeln.
Das IMK steht vor diesem Hintergrund für eine symbiotische Anwendung der etablierten Methoden aus den Bereichen der Kybernetik bzw. Regelungstechnik einerseits und der Künstlichen Intelligenz (KI) andererseits. Dies ermöglicht uns die Entwicklung innovativer und überlegener Lösungen, von denen unsere Kunden profitieren.
Weiterhin verfolgt das IMK eine „bionische“ Herangehensweise. Wie bereits dem obigen Zitat von Hermann SCHMIDT zu entnehmen war, hält die Natur einen äußerst umfangreichen Fundes von Lösungsstrategien bereit, die auf aktuelle und zukünftige Problemstellungen adaptiert werden können. Der große Vorteil dieser Strategien ist, dass sie teilweise über viele tausende von Jahren hinweg in einem „gnadenlosen“ „Trial-and-Error“-Prozess entwickelt und optimiert wurden.
Anstatt die Natur zu kopieren (Bionik), können selbstverständlich auch nicht-natürliche Systeme (Bild unten) kopiert werden. Systeme abstrahieren, Analogien erkennen und nutzen gehört deshalb auch zu den primären Forschungsaktivitäten des IMK (s. a. Systemtheorie).
Gegenwart und Zukunft von Regelungstechnik (Control Theory) und Künstlicher Intelligenz (Artificial Intelligence, AI): „Control theory deals with designing devices that act optimally on the basis of feedback from the environment. Initially, the mathematical tools of control theory were quite different from AI, but the fields are coming closer together.“ (Stuart Russell; Peter Norvig: Artificial Intelligence, 2010) | ||
| Haben wir Ihr Interesse geweckt? Nehmen Sie gerne Kontakt zu uns auf! |
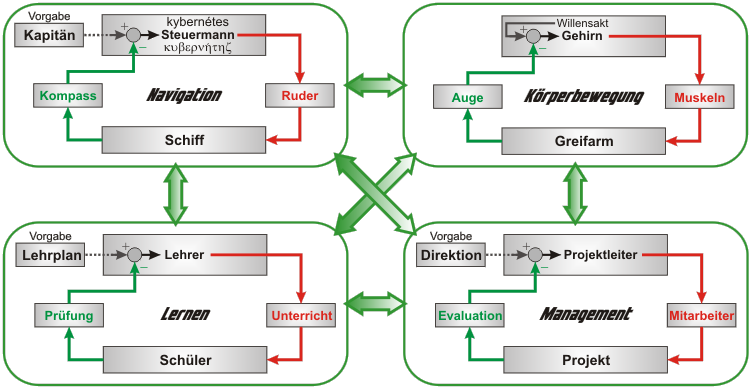
Die Grundprinzipien der Kybernetik sind universell und überall anzutreffen!