Hardware - IMK Engineering – Ingenieurbüro für Mechatronik und Kybernetik Dr. Bruns
Hauptmenü:
Kompetenzen
Kompetenzen ⇒ Hardware
In der heutigen Zeit sind elektronische Bauteile (Hardware) in jeder Preis- und Leistungsklasse ausreichend verfügbar. Für nahezu jede Aufgabe bzw. Anwendung gibt es inzwischen sehr leistungsfähige und kostengünstige integrierte Schaltkreise (Integrated Circuits, IC), die sich je nach Anforderung zusammenstellen und auf einer Leiterplatte (Printed Circuit Board, PCB) integrieren lassen. Insbesondere für „kleine“ Systeme mit begrenzten Funktionalitäten und Anforderungen an die Steuerung bzw. die Regelung kann deshalb häufig die Hardware der Informationsverarbeitung schnell und „maßgeschneidert“ – ohne „Overhead“ und optimiert für die jeweilige Aufgabe – entworfen werden.
IMK-Hardware-Entwicklung
Den Schwerpunkt der Hardware-Entwicklung des IMK bilden Mikrocontroller-Boards mit ARM-Cortex-M4-Prozessorn als Kernelement. Bevorzugt werden Mikrocontroller (Microcontroller Unit, MCU) der STM32-Serie verwendet, die bspw. mit 168 oder 180 MHz getaktet sind und über einen „Digital Signal Processor“ (DSP) sowie eine „Floating Point Unit“ (FPU) verfügen. Diese MCUs verfügen darüber hinaus noch über viele weitere, mächtige „Features“ wie bspw. „Direct Memory Access“ (DMA). Damit sind die MCUs extrem leistungsfähig und für sehr viele Anwendungen völlig ausreichend dimensioniert und ideal geeignet.
„Smart Control Systems“ von IMK Engineering
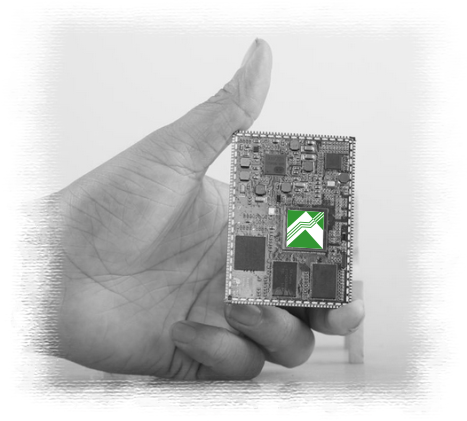
Mit einem am IMK speziell entwickelten Controller-Board für die Steuerung einer 6-Achs-Parallelkinematik können auf Basis einer STM32F4-MCU (168 MHz) insgesamt 6 BLDC-Motoren über CAN-Bus geregelt werden. Die MCU umfasst bereits 2 CAN-Controller, die beide mit bis zu 1 MBit/s (High-Speed CAN) konfiguriert werden können. Über jeden CAN-Bus können 3 der 6 Motoren angesteuert werden. Dadurch kann eine Zykluszeit der Regelung von einer Millisekunde (1 ms), für alle 6 Motoren parallel, problemlos erreicht werden. Weiterhin werden parallel zu der Regelung Monitoring-Daten über eine UART-USB-Verbindung (3 MBit/s) versendet, jede Millisekunde (ms) ca. 250 Byte. Dabei ist das System mit ca. 10 % CPU-Last noch nicht annähernd am Ende seiner Möglichkeiten. |
STM32F4-MCU als Basis aktueller IMK-Boards
Auf den je nach Anforderungen des Zielsystems „maßgeschneiderten“ Controller-Boards des IMK können unter anderem bspw. die folgenden Funktionalitäten zur Verfügung gestellt werden:
- Digitale I/O: Verarbeitung digitaler Signale, inkl. PWM-Signale
- Analoge I/O: Verarbeitung analoger Signale
- Encoder: Auswertung eines Drehgebers
- LAN/WLAN (Ethernet) und Mobilfunk (GSM):
Realisierung von IoT- und CPS-Funktionalitäten - UART (Universal Asynchronous Receiver/Transmitter) für serielle Kommunikation mit PC (i.V.m. USB-Konverter bis 3Mbit/s) oder anderen MCUs
- CAN (Controller Area Network) für Kommunikation mit weiteren CAN-Knoten, bis 1 MBit/s
- SPI (Serial Peripheral Interface) und/oder I²C (Inter-Integrated Circuit) für Kommunikation mit weiteren MCUs oder mit auf dem Board integrierten, aktiven Bauteilen (IC) mit definierter Funktionalität (bspw. spezielle Sensoren etc.)
- USB: Bspw. für Anschluss eines USB-Sticks
- „User-Interface“-Komponenten: LCD-Display, Touch-Screen, Keypad, Keyboard etc.
- …
„Cyber-Physical Systems“ (CPS) Die sogenannten „Cyber-Physical Systems“ (CPS) können als Weiterentwicklung der „Embedded Systems“ (ES) angesehen werden. Die CPS unterscheiden sich von den ES prinzipiell in den beiden folgenden Punkten:
Bei der von uns entwickelten Steuerungshardware erfolgt die Vernetzung bspw. über optionale Ethernet- oder GSM-Module, in Kombination mit unseren Webserver- bzw. Webclient-Softwaremodulen. Die Autonomisierung wird erreicht durch eine anspruchsvolle Informationsverarbeitung und die Implementierung komplexer und „maßgeschneiderter“ Algorithmen (s. a. Operations Research, Scientific Automation sowie Künstliche Intelligenz) in unserer Software. |
Sollten Sie die von Ihnen benötigten Funktionalitäten in den oben genannten, ausgewählten Beispielen nicht gefunden haben, sprechen Sie uns bitte an. Über Kommunikationsschnittstellen wie SPI und I²C lassen sich aktive Bauteile (IC) mit nahezu jeder gewünschten Funktionalität in das Gesamtsystem integrieren.
„Drossel 4.0“ (Smart Flow Control) und „Figulus Control“ Weitere Beispiele für von uns entwickelte, anwendungsspezifische Hardware (und Software) sind die IoT-Steuerung Smart Flow Control mit integriertem Mobilfunkmodul sowie die modulare 3D-Drucker-Steuerung Figulus Control für bis zu 6 Achsen. In beiden Anwendungsfällen wird das „Piggyback“-Design für maximale Flexibilität angewendet. |
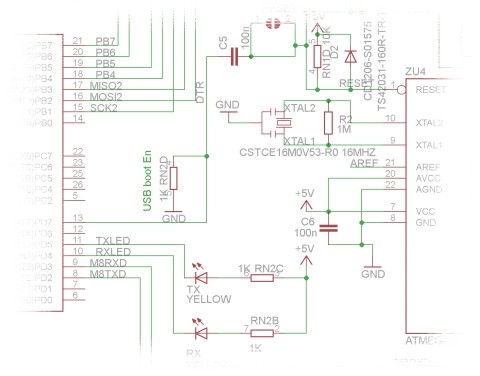
Schaltplan
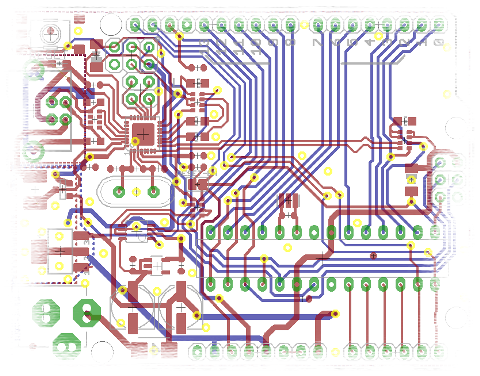
Board-Design
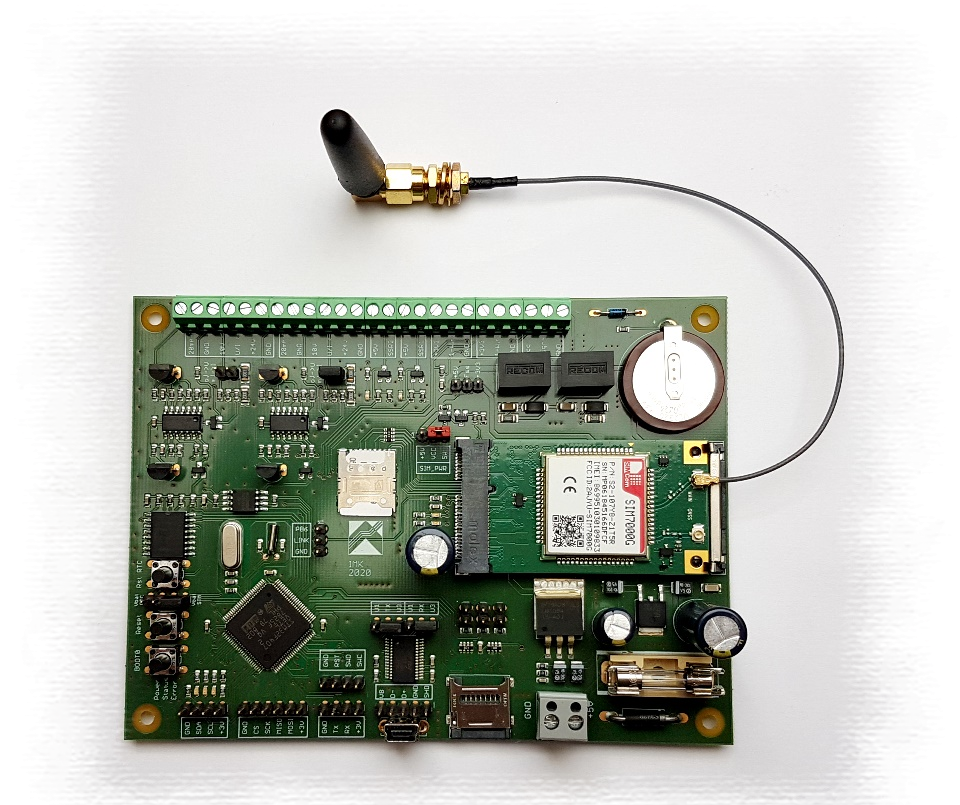
Flexible IoT-Steuerungsplattform für verschiedene IoT-Anwendungen (Vernetzung via 2G bis 5G, NB-IoT, ...)